Script example of curve projection
This document shows how to use the algorithm of trajectory projection to design feasible gradient waveforms.
Run the file 'script_example_gradient_waveform.m'
Contents
Enter the Gradient constraints
close all clear all clc
Parameters of the scanner (here used in [Lustig et al, IEEE TMI 2008])
Gmax = 40e-3; % T/m Smax = 150e-3; % T/m/ms Kmax = 600; % m^-1 gamma = 42.576*1e3; % kHz/T alpha = gamma*Gmax; % in m^-1 ms^-1 beta = gamma*Smax; % in m^-1 ms^-2 Dt = .004; % sampling time in ms
Choose an input trajectory for the algorithm
Give an input trajectory
load citiesTSPexample x=pts*Kmax; s0=parameterize_maximum_speed(x,.8*alpha,Dt)'; figure, plot(s0(1:end,1),s0(1:end,2),'b.','linewidth',2) axis equal, axis off set(gcf,'Color',[1 1 1]) legend('input trajectory')

Specify constraints
dt=Dt; % discretisation step; % define kinematic constraints %C_kine=set_MRI_constraints_RV(alpha,beta,dt); % Rotation Variant Constraints C_kine=set_MRI_constraints_RIV(alpha,beta,dt); % Rotation Invariant Constraints % and affine constraints C_linear=set_Linear_constraints(size(s0,1),size(s0,2)); %C_linear=set_Linear_constraints(size(s0,1),size(s0,2),'start_point',[0 0],'end_point',[0 0],'gradient_moment_nulling',1,'curve_splitting',1400); % Algorithm parameters Algo_param.nit = 30000; % number of iterations Algo_param.L=16; % Lipschitz constant of the gradient Algo_param.discretization_step=dt; % optional parameters (default 0) Algo_param.show_progression = 0; % 0 = no progression , can be really slow Algo_param.display_results = 1;
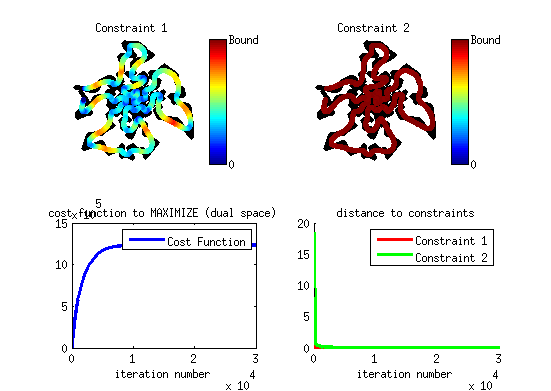
Project curve with Rotation-Invariant Constraints
tic s1=Project_Curve_Affine_Constraints(s0,C_kine,C_linear,Algo_param); toc
---------------------- Constraint verifications: Value of constraint 1: 5.9609 (Bound: 6.8122) Value of constraint 2: 0.10596 (Bound: 0.10218) ---------------------- ---------------------- Elapsed time is 75.540057 seconds.
Display the output trajectory
figure, plot(s0(:,1),s0(:,2),'b','linewidth',2) hold on, plot(s1(:,1),s1(:,2),'r','linewidth',3) axis equal, axis off set(gcf,'Color',[1 1 1]) legend('input trajectory', 'projected trajectory')

Display the gradient
g1=Prime(s1,Dt)/gamma; gg1=Second(s1,Dt)/gamma; T=size(s1,1); figure, plot(g1(:,1),'r','linewidth',3), axis([0 T*1.1 -Gmax*1.1 Gmax*1.1]) hold on, plot(g1(:,2),'b','linewidth',3), axis([0 T*1.1 -Gmax*1.1 Gmax*1.1]) g1n=sqrt(g1(:,1).^2+g1(:,2).^2); hold on, plot(g1n,'k','linewidth',3), axis([0 T*1.1 -Gmax*1.1 Gmax*1.1]) set(gcf,'Color',[1 1 1]) hold on, plot((1:T),0*(1:T), '--k','lineWidth',3) hold on, plot((1:T),0*(1:T)+Gmax, '--k','lineWidth',2) hold on, plot((1:T),0*(1:T)-Gmax, '--k','lineWidth',2) set(gca,'XTick',[0,T]) set(gca,'XTickLabel',{'0',T*Dt}) set(gca,'YTick',[-Gmax,Gmax]) set(gca,'YTickLabel',{-Gmax*1e2,Gmax*1e2}) set(gca,'FontSize',15) ylabel('G/cm') xlabel('ms') hold off h_legend=legend('$ g_x(t)$','$ g_y(t)$','$|g(t)|$'); set(h_legend,'FontSize',20,'interpreter','latex'); title('Gradient Waveforms') figure, plot(gg1(:,1),'r','linewidth',3), axis([0 T*1.1 -Smax*1.1 Smax*1.1]) hold on, plot(gg1(:,2),'b','linewidth',3), axis([0 T*1.1 -Smax*1.1 Smax*1.1]) gg1n=sqrt(gg1(:,1).^2+gg1(:,2).^2); hold on, plot(gg1n,'k','linewidth',3), axis([0 T*1.1 -Smax*1.1 Smax*1.1]) set(gcf,'Color',[1 1 1]) hold on, plot((1:T),0*(1:T), '--k','lineWidth',3) hold on, plot((1:T),0*(1:T)+Smax, '--k','lineWidth',2) hold on, plot((1:T),0*(1:T)-Smax, '--k','lineWidth',2) set(gca,'XTick',[0,T]) set(gca,'XTickLabel',{'0',T*Dt}) set(gca,'YTick',[-Smax,Smax]) set(gca,'YTickLabel',{-Smax*1e2,Smax*1e2}) set(gca,'FontSize',15) ylabel('G/cm/ms') xlabel('ms') hold off h_legend=legend('$ \dot g_x(t)$','$ \dot g_y(t)$','$| \dot g(t)|$'); set(h_legend,'FontSize',20,'interpreter','latex'); title('Slew rate')

